誘導型近接センサ (Inductive proximity sensor)
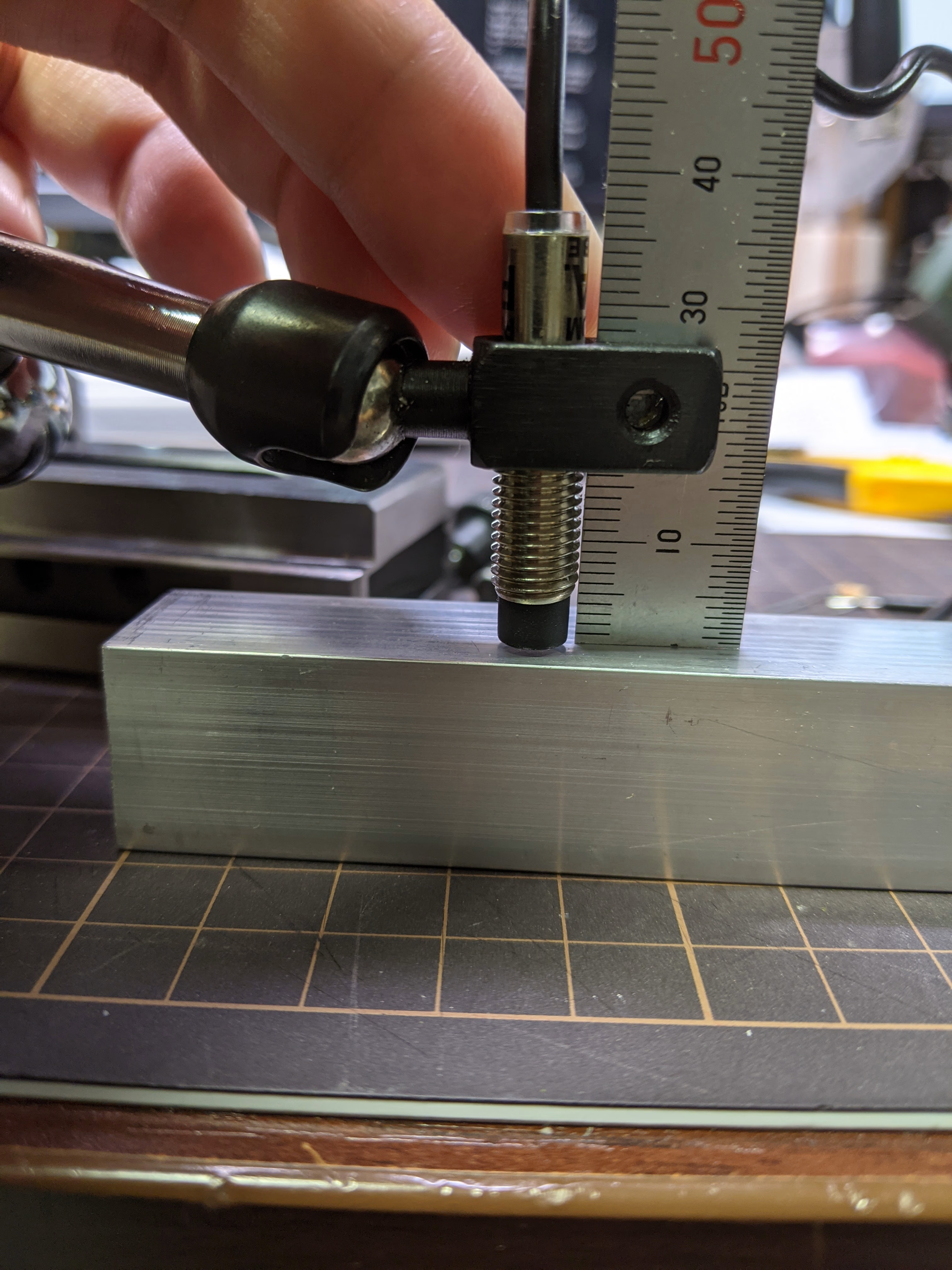
手元にあるのは Original Prusa i3 MK2 についてきた PINDA Probe (温度センサなし) のやつなのでこれを試してみる。ついてきたやつなので詳細なスペックは不明。
誘導型近接センサは NPN/PNP の違いと Normally On / Normally Off の違いがある。これは M8 1.0mmピッチ(細目) NPN NC タイプ 5V。動作原理とかはオムロンのサイトが詳しい
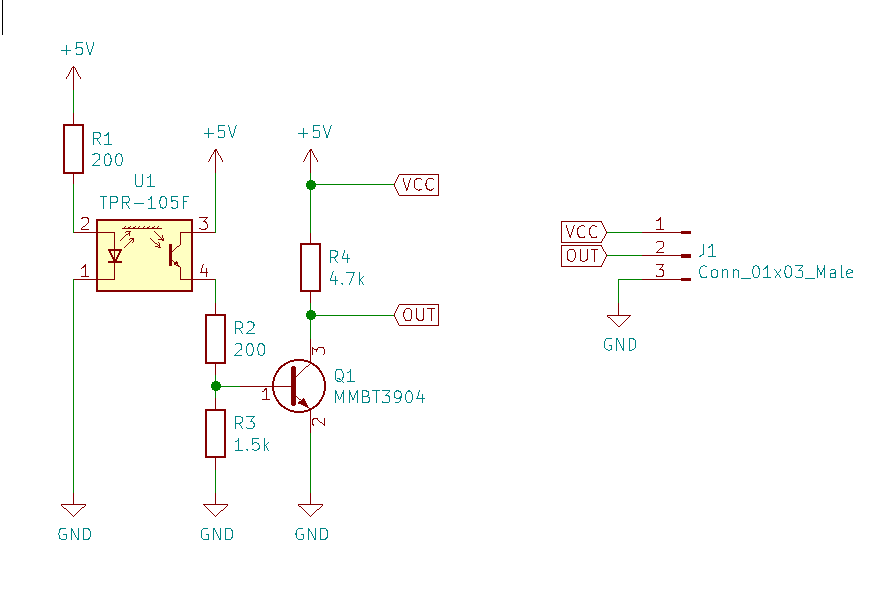
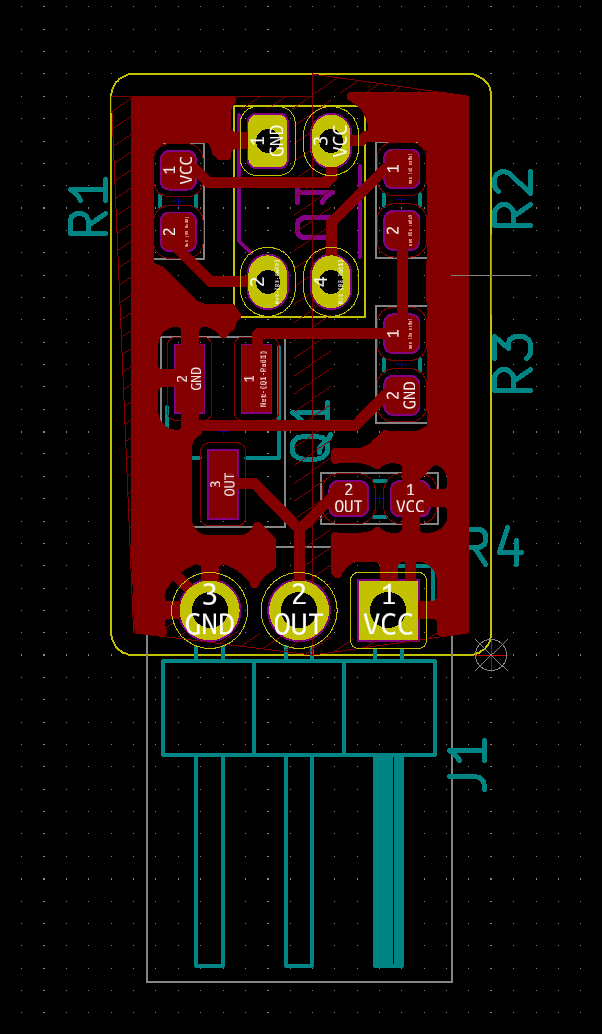
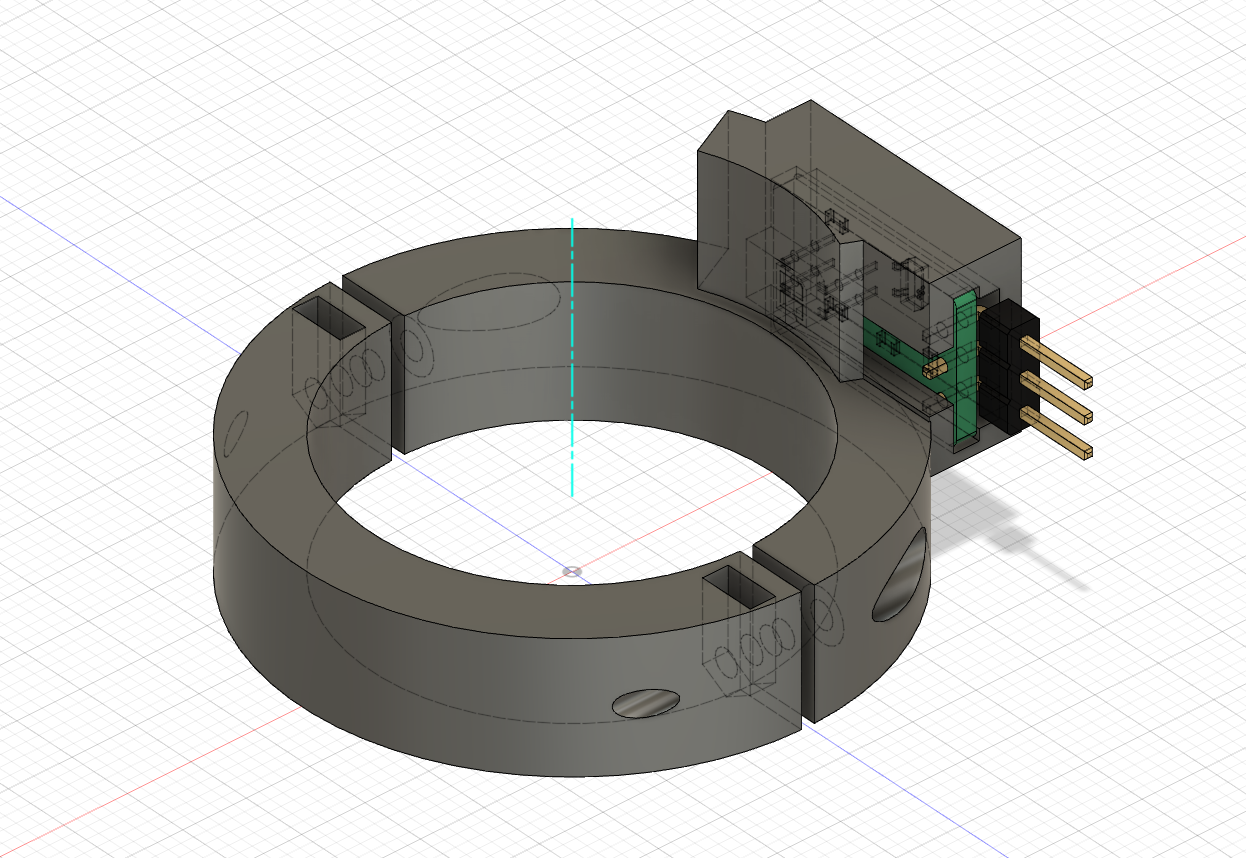
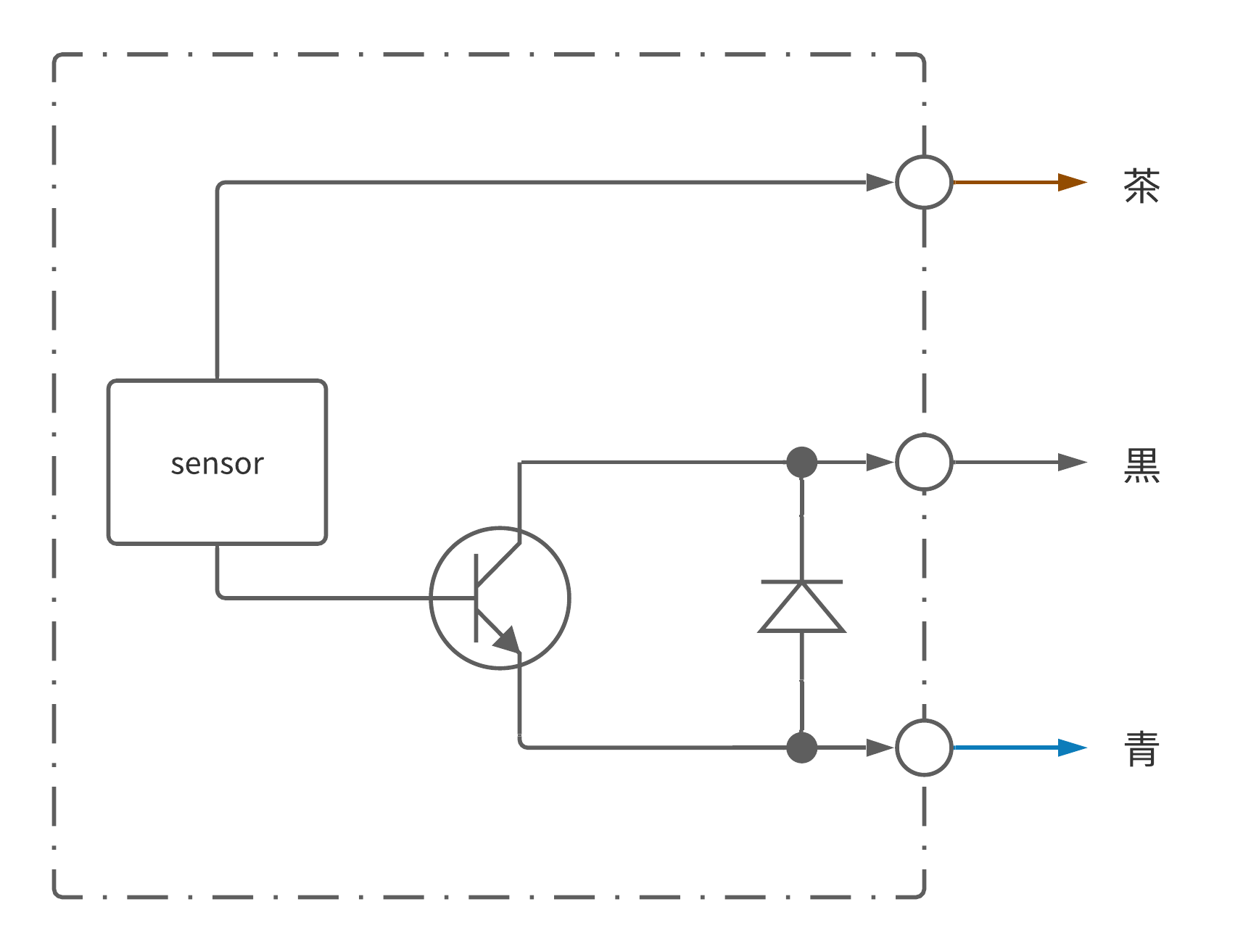
上の図のうち、点線でかこまれている部分を含んでセンサ本体になっている。
- 茶: VCC (5V)
- 黒: Out
- 青: GND
VCC Out 間に負荷抵抗 (10kΩとか) つけてプルアップする。
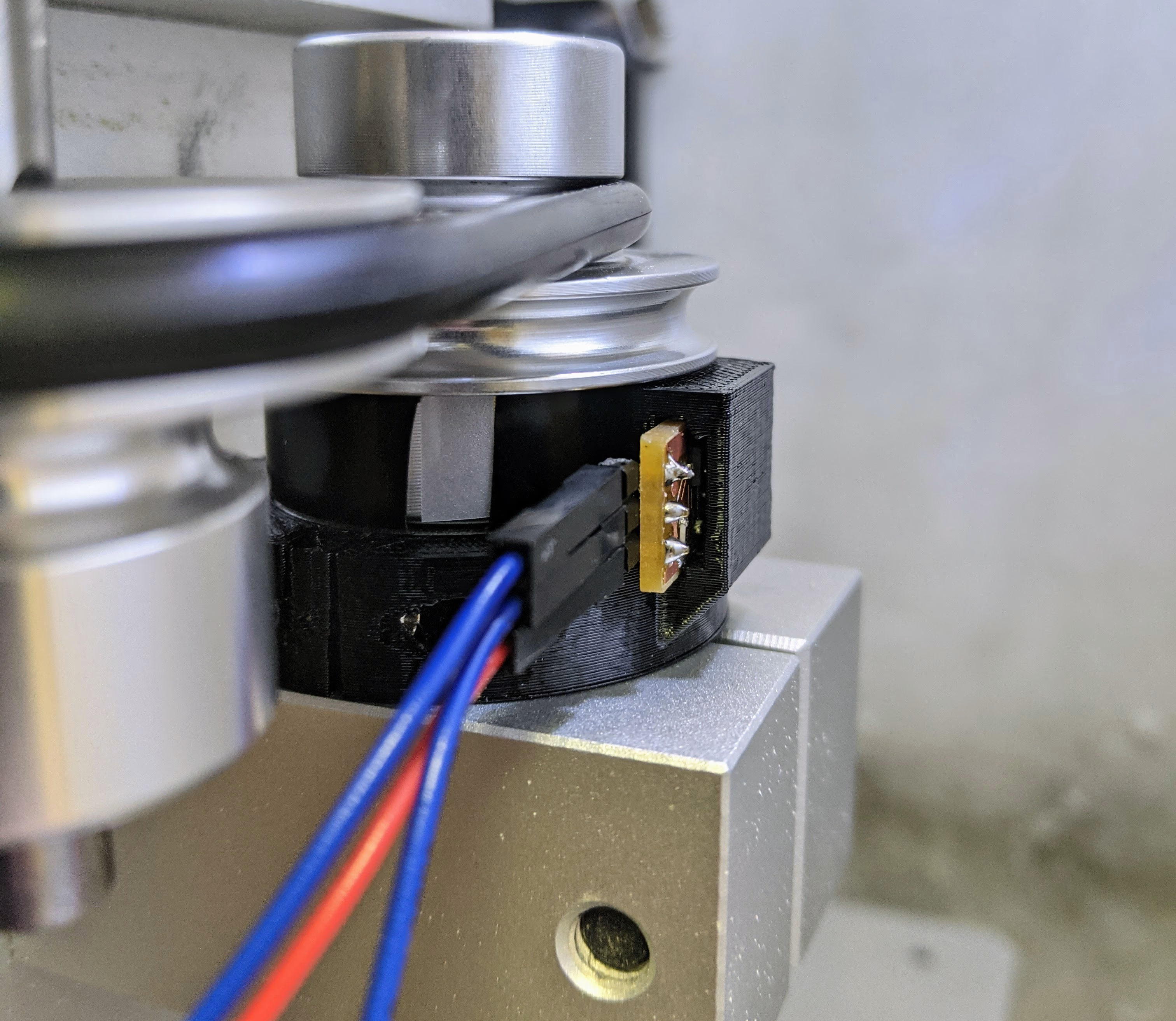
ネジピッチが細目なので手元にあるナットが入らなかった。
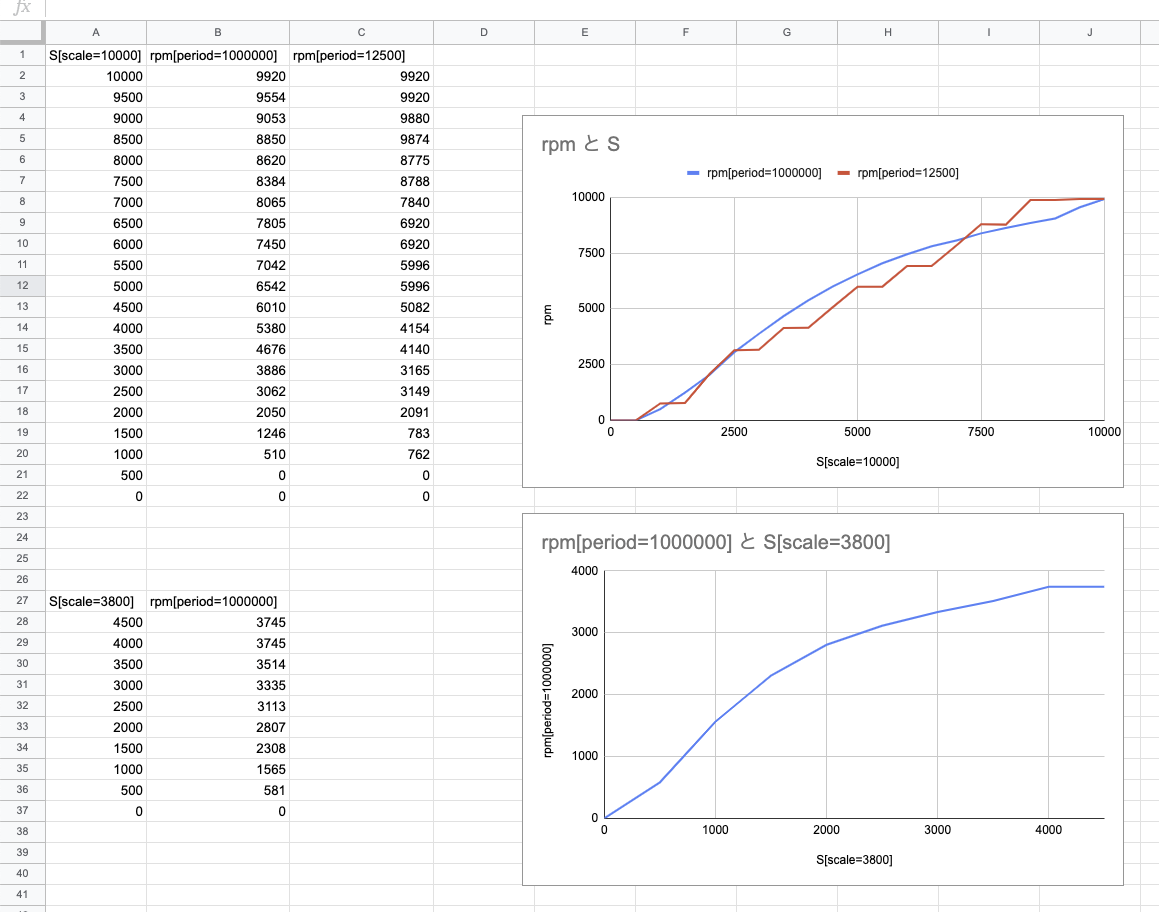
鉄とアルミでは検出距離が違うはずなので検証してみた。
鉄

2mm ぐらい。
アルミ
0.5mm ぐらい。
アルミ相手に非接触センサとして使うにはちょっとこわい。
関連エントリー
- Original Prusa MK2.5 Upgrade がきたので作業した Original Prusa i3 MK2S Kit (3Dプリンタ) を買ってた | tech - 氾濫原 と書いたすぐ1ヶ月ほどあとに ...
- Original Prusa i3 MK2.5 のエクストルーダーを R3 にアップグレード エクストルーダーまわりがR3になり新モデルが提供されるようになったのをうけて、これを試してみることにした。主に冷却が強化されるというものにな...
- Voron 2.4 に BTT Smart Filament Sensor を追加 Octopus の場合 STOP 用のターミナル (Stop_0~Stop_7) ならどこでも良いっぽい? 一応 PG12 か PG13 が...
- 家庭用ミシンの押さえを3Dプリンタで作る 家庭用ミシンの押さえ(pressure foot)はいろいろ市販されているが、最大公約数的なものが多く「あとちょっと小さいのが欲しい」みたい...
- SMD と THT 両方ある汎用トランジスタ 汎用トランジスタで使いやすいやつ。ブレッドボードでリードタイプを使いつつ、実際に作るときは表面実装品を使いたいので、同等品があってメジャーな...